DCCL uses the Google Protocol Buffers (Protobuf) language to define messages. The DCCL IDL is defined as extensions to the Protobuf language message and field options to allow more compact encoding than is possible with the default Protobuf meta-data. You should familiarize yourself with basic Protobuf usage before reading the rest of this document: see http://code.google.com/apis/protocolbuffers/docs/overview.html.
An example DCCL message is as follows (using Protobuf version 2.4.0 or newer; see old syntax for older versions):
In the above message, the snippet
represents the message options extensions since they affect the design of the entire DCCL message (in this case "NavigationReport"). The field options affect a given field, e.g.
The full Protobuf definition of the DCCL extensions is given in option_extensions.proto (as messages DCCLFieldOptions and DCCLMessageOptions).
DCCL options
The core set of DCCL options is given in the following table:
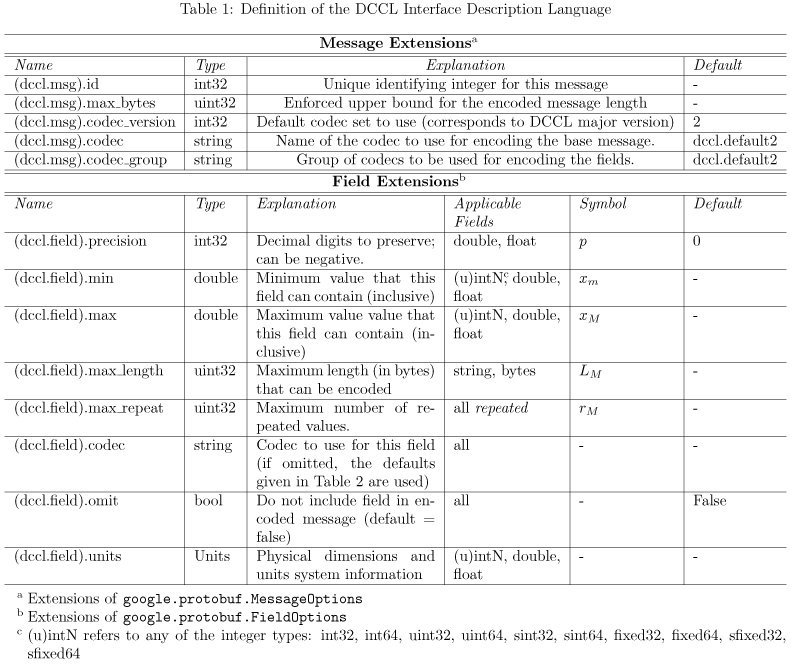
DCCL ID: (dccl.msg).id
The DCCL ID is used to uniquely identify a given message name without having to encode the name in the message (encoding a number is much cheaper than a string). To interoperate with other groups, please see http://gobysoft.org/wiki/DcclIdTable. For private work, please use IDs 124-127 (one-byte) and 128-255 (two-byte).
DCCL Maximum bytes: (dccl.msg).max_bytes
This value is the maximum message size before you get an error from DCCL. This is a design tool to help ensure messages do not exceed a desired value, typically the path maximum transmission unit (MTU). Messages that do not take the actual max_bytes size are encoded only as the size they take up (i.e. they are not padded to max_bytes).
DCCL Codec Version: (dccl.msg).codec_version
This option sets the default codec version (which is not wire-compatibility between Goby/DCCL 2 and DCCL 3). Hence, the default is "2" to preserve backwards-compatibility on a message-by-message basis, but this should always be set to "3" when you are able to use DCCL v3 for all nodes that deploy this message.
DCCL Static Units
Since the DCCL field bounds (min, max, and precision) are often based off the physical origins of the data, it is important to define the units of measure of those fields. The DCCL IDL has support for defining the units of a numeric field's quantity. When using the DCCL C++ library, this support is directly connected to the Boost Units C++ library: http://www.boost.org/doc/html/boost_units.html. The units of a given field are given by two parameters: the physical dimension (e.g. length, force, mass, etc.), and the unit system which defaults to the International System of Units (SI). The units of the field can also be specified directly, outside of a canonical system (e.g. nautical mile, fathom, yard, knot, etc.).
The fields defined with units generate additional C++ methods using the DCCL plugin (protoc-gen-dccl) to the GPB compiler (protoc). The Debian package for the plugin is
These additional methods provide accessors and mutators for the dimensioned Boost Units quantities, with full static "unit safety", and correct conversions between different units of the same dimensions (e.g. feet to meters). Unit safety is defined as static (compiler-checked) dimensional analysis. The term is a blending of the (computer science) notion of type safety with (physical) dimensional analysis. For example, in a unit-safe system, the compiler will not allow the user to set a field with dimensions of length to a quantity of hours.
The Units field extension has the following options:
-
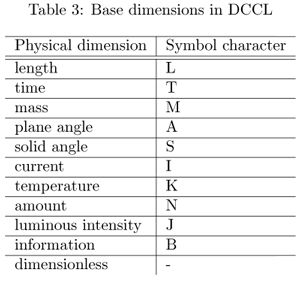
base_dimensions(string): Specifies the dimensions of the field as a combination of powers of the base dimensions given in Table 3. For example, acceleration would be defined as"LT^-2". -
derived_dimensions(string): As a convenience alternative to thebase_dimensionsspecification, any of the Boost Units "derived dimensions" can be used. For example instead ofbase_dimensions:"L^-1 M T^-2"for pressure, one can usederived_dimensions: "pressure". Multiplication and division of derived dimensions is also supported using the "*" and "/" operators. The available derived dimensions are those listed here: http://www.boost.org/doc/html/boost_units/Reference.html#dimensions_reference. The string to use here is the name of the dimension as given in Boost Units, minus the "_dimension". For example to use boost::units::acceleration_dimension, specify "acceleration" in this field. -
system(string, defaults to "si"): A boost::units or user-defined system of units to use for this field. Defaults to the SI system with base units of kelvin (temperature), second (time), meter (length), kilogram (mass), candela (luminous intensity), mole (amount of substance) and ampere (electric current). The available Boost Units systems include:- "si": http://www.boost.org/doc/html/boost_units/Reference.html#si_system_reference
- "cgs": http://www.boost.org/doc/html/boost_units/Reference.html#cgs_system_reference
- "temperature::celsius": http://www.boost.org/doc/html/boost_units/Reference.html#temperature_system_reference
- "temperature::fahrenheit": http://www.boost.org/doc/html/boost_units/Reference.html#temperature_system_reference
- "angle::degree": http://www.boost.org/doc/html/boost_units/Reference.html#trigonometry_and_angle_system_reference
- "angle::gradian": http://www.boost.org/doc/html/boost_units/Reference.html#trigonometry_and_angle_system_reference
- "angle::revolution": http://www.boost.org/doc/html/boost_units/Reference.html#trigonometry_and_angle_system_reference
-
relative_temperature(bool, defaults to false): A special extension only used for temperature fields. Setting this to true means that the temperature is relative (i.e. a difference of absolute temperatures) instead of an absolute temperature. This matters to support correct unit conversions between different temperature systems. For example, relative degrees Kelvin are the same as relative degrees Celsius, but the absolute scales differ by 273.15 degrees. -
unit(string): As an alternative to thedimensionsandsystemspecification, the field can be set to use particular (typically non-SI) units. A few examples of such units that are still often encountered in the marine domain areunit:"metric::nautical_mile",unit:"metric::bar", andunit:"us::yard". Here you can use any of the Boost Units Base Unit types, given here: http://www.boost.org/doc/html/boost_units/Reference.html#boost_units.Reference.base_units_by_category. The string to specify here is the Base Unit to use, minus the "boost::units::" prefix and the "_base_unit" suffix. For example,boost::units::metric::nautical_mile_base_unitshould be specified as "metric::nautical_mile" in this field.
DCCL Units Generated Code
The DCCL Units C++ generated accessors and mutators mirror those provided by the standard Google Protocol Buffers compiler for numeric fields, with the method name appended by the string "_with_units". For the standard Protobuf generated code see https://developers.google.com/protocol-buffers/docs/reference/cpp-generated. DCCL Units are only valid on numeric fields (either singular or repeated). Two accessors are provided for convenience: a non-template accessor that returns the value as the Quantity (i.e. boost::units::quantity) defined in the DCCL field, and a template accessor that can take any valid Boost Units Quantity (i.e. a type with the same dimensions as the DCCL field) and return the value in that type, accounting for all conversion factors.
Singular Numeric Fields
For a singular (optional or required) field "foo" with the following parameters:
- Type: "[foo type]", the original unit-less field type (e.g. google::protobuf::int32, double)
- Unit dimension: "[foo dimension]" (e.g. boost::units::length_dimension, boost::units::derived_dimension< boost::units::length_base_dimension,1, boost::units::time_base_dimension,-1>::type)
- Unit system: "[foo system]" (e.g. boost::units::si::system, boost::units::degree::system)
the following additional methods are defined for unit safe access to the DCCL message:
Repeated Numeric Fields
For a repeated field "foo" with the following parameters:
- Type: "[foo type]"
- Unit dimension: "[foo dimension]"
- Unit system: "[foo system]"
the following additional methods are defined for unit safe access to the DCCL message:
DCCL Units examples
Here are a few example DCCL messages which include unit specification:
AUVStatus
For example, to set an AUVStatus message's x and y fields to meters (the default for the base dimension of length, since the default system is SI), and then later access them as nautical miles, one can use this C++ example:
The value of x_nm is 0.54 nautical miles and y_nm is 0.27 nautical miles.
CTDMessage
CommandMessage
DCCL Syntax for older Protobuf versions (< 2.4.0)
When using older versions of Google Protocol Buffers than 2.4.0, options cannot be aggregated. Thus, the example NavigationReport message would be written as such:
Note that this syntax is valid for newer versions of Protobuf as well, so it's the choice to use if you are concerned about portability over readability.
